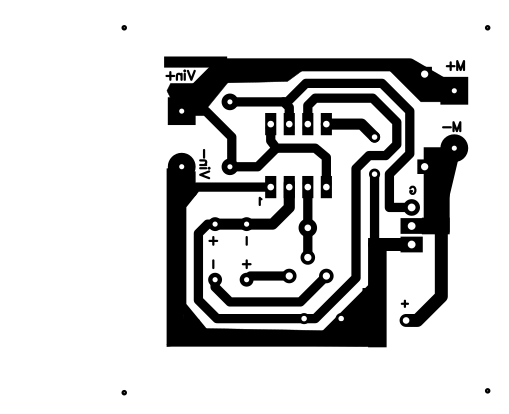
NE555 based PWM DC Motor Speed Controller Circuit with PCB Layout
In this article I will show you how to create a NE555 Timer IC based PWM DC Motor Speed Controller. I will share the circuit diagram, component list, tips for… Read more »
In this article I will show you how to create a NE555 Timer IC based PWM DC Motor Speed Controller. I will share the circuit diagram, component list, tips for… Read more »
Let’s make an Obstacle avoiding Robot. In this brief tutorial I will show how to build a perfect obstacle avoiding (run-away) robot using Arduino. I have used an Ultrasonic sensor… Read more »