Learn Java, Struts 2, Spring, Hibernate, PHP, jQuery, YUI and HTML CSS on sribasu.com. Web blog of Prithwiraj Bose, freelancer professional web designer and Architect of Distributed Applications at TATA Consultancy Services.
GitHub Copilot is a powerful tool that can help developers write better code faster and easier. It is an AI-powered code assistant that can suggest code snippets, complete functions, and… Read more »
Do you know you can use your Raspberry Pi as WiFi Access Point? Infact Raspberry Pi as WiFi Access Point is really useful when you want to control your electronics… Read more »
Nifty and Sensex: What are they and why do they matter? Nifty and Sensex are the two most popular indices of the Indian stock market. They represent the performance of… Read more »
Cloud computing is a rapidly growing industry, and there are a number of different cloud service providers to choose from. Each provider has its own strengths and weaknesses, so it’s… Read more »
So, you’re thinking about expanding your business with new equipment. You know you want to finance your missions. And you’re curious how do lenders decide how much they’ll lend you… Read more »
Electronics Basics Videos Nobody teaches Basics of Electronics better than GreatScott through Video demonstrations! Complete Electronics Projects See complete Electronics Projects by GreatScott! Awesome discrete components and microcontroller… Read more »
This channel is full of Caucasus food for warmhearted feasts, genuine beauties of the Caucasus region and tour routes. You can also find wine-making and home-brewing recipes and ideas that… Read more »
Java has been dominating the distributed and cloud application industry for several years. Since its inception, 25 years back, Java programming language never faced a challenge of this magnitude like… Read more »
The COVID pandemic has been raging for the last 1.5 years. The second surge of COVID in India is really critical and massive. But now we know much more about… Read more »
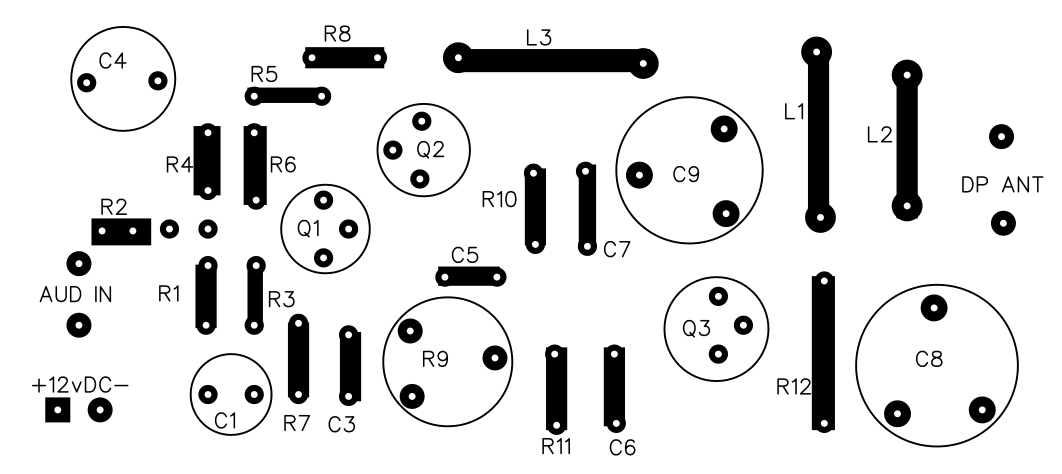
Legal Disclaimer: This is an educational blog post showing theory behind a high power FM Transmitter. You are not supposed to create this transmitter yourself just for testing, trying or… Read more »